1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
|
void dump_scb()
{
uint32_t icsr = SCB->ICSR;
uint32_t shcsr = SCB->SHCSR;
printf("ICSR:\r\n");
printf("\t there %s interrupt pending\r\n",
(icsr & SCB_ICSR_ISRPENDING_Msk) ? "is" : "isn't");
printf("\t pending exception number:%u\r\n",
(icsr & SCB_ICSR_VECTPENDING_Msk) >> SCB_ICSR_VECTPENDING_Pos);
printf("\t active exception number:%u\r\n",
(icsr & SCB_ICSR_VECTACTIVE_Msk) >> SCB_ICSR_VECTACTIVE_Pos);
printf("SHPRx:\r\n");
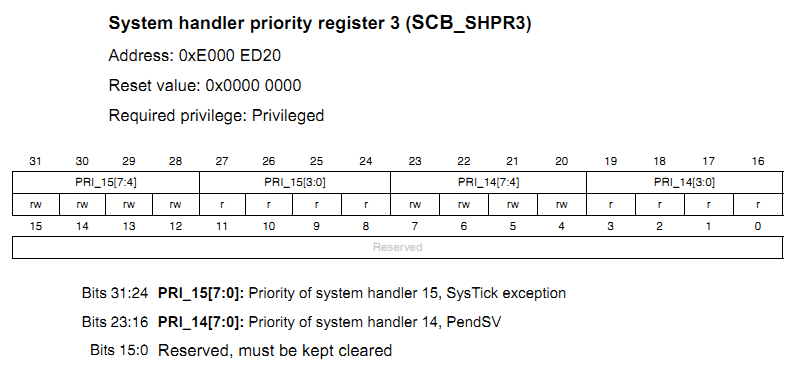
printf("\t Mem Manage:%hhd\r\n", (SCB->SHP[0] & PRIORITY_Msk) >> PRIORITY_Pos);
printf("\t Bus Fault:%hhd\r\n", (SCB->SHP[1] & PRIORITY_Msk) >> PRIORITY_Pos);
printf("\t Usage Fault:%hhd\r\n", (SCB->SHP[2] & PRIORITY_Msk) >> PRIORITY_Pos);
printf("\t SVC:%hhd\r\n", (SCB->SHP[7] & PRIORITY_Msk) >> PRIORITY_Pos);
printf("\t Debug Monitor:%hhd\r\n", (SCB->SHP[8] & PRIORITY_Msk) >> PRIORITY_Pos);
printf("\t PendSV:%hhd\r\n", (SCB->SHP[10] & PRIORITY_Msk) >> PRIORITY_Pos);
printf("\t SysTick:%hhd\r\n", (SCB->SHP[11] & PRIORITY_Msk) >> PRIORITY_Pos);
printf("SHCSR:\r\n");
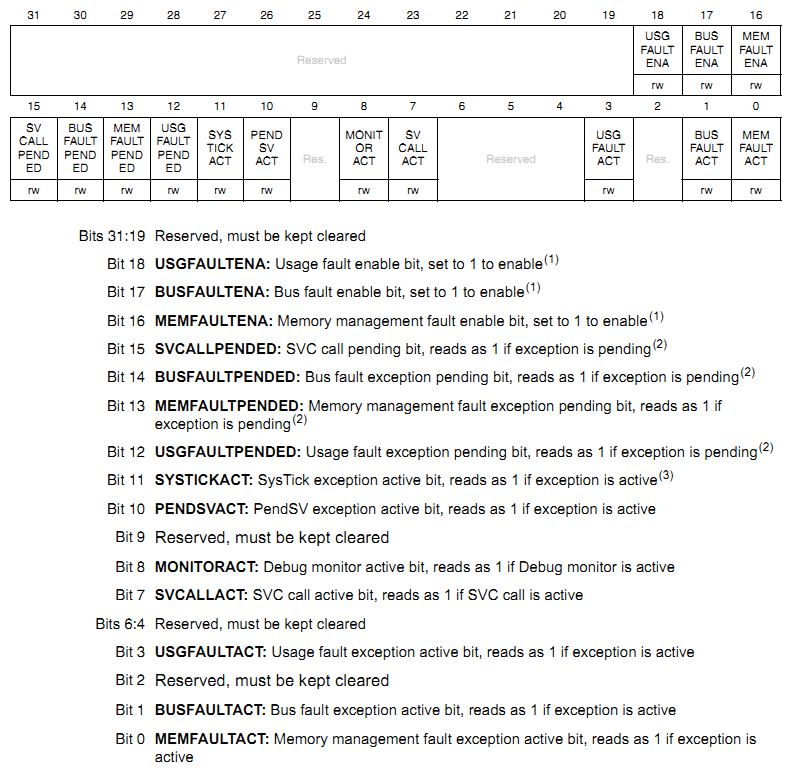
printf("\t Usage Fault enable:%u\r\n",
(shcsr & SCB_SHCSR_USGFAULTENA_Msk) >> SCB_SHCSR_USGFAULTENA_Pos);
printf("\t Bus Fault enable:%u\r\n",
(shcsr & SCB_SHCSR_BUSFAULTENA_Msk) >> SCB_SHCSR_BUSFAULTENA_Pos);
printf("\t Mem Fault enable:%u\r\n",
(shcsr & SCB_SHCSR_MEMFAULTENA_Msk) >> SCB_SHCSR_MEMFAULTENA_Pos);
printf("\r\n");
printf("\t SVCall pended:%u\r\n",
(shcsr & SCB_SHCSR_SVCALLPENDED_Msk) >> SCB_SHCSR_SVCALLPENDED_Pos);
printf("\t Bus Fault pended:%u\r\n",
(shcsr & SCB_SHCSR_BUSFAULTPENDED_Msk) >> SCB_SHCSR_BUSFAULTPENDED_Pos);
printf("\t Mem Fault pended:%u\r\n",
(shcsr & SCB_SHCSR_MEMFAULTPENDED_Msk) >> SCB_SHCSR_MEMFAULTPENDED_Pos);
printf("\t Usage Fault pended:%u\r\n",
(shcsr & SCB_SHCSR_USGFAULTPENDED_Msk) >> SCB_SHCSR_USGFAULTPENDED_Pos);
printf("\r\n");
printf("\t SysTick active:%u\r\n",
(shcsr & SCB_SHCSR_SYSTICKACT_Msk) >> SCB_SHCSR_SYSTICKACT_Pos);
printf("\t PendSV active:%u\r\n",
(shcsr & SCB_SHCSR_PENDSVACT_Msk) >> SCB_SHCSR_PENDSVACT_Pos);
printf("\t Monitor active:%u\r\n",
(shcsr & SCB_SHCSR_MONITORACT_Msk) >> SCB_SHCSR_MONITORACT_Pos);
printf("\t SVCall active:%u\r\n",
(shcsr & SCB_SHCSR_SVCALLACT_Msk) >> SCB_SHCSR_SVCALLACT_Pos);
printf("\t Usage Fault active:%u\r\n",
(shcsr & SCB_SHCSR_USGFAULTACT_Msk) >> SCB_SHCSR_USGFAULTACT_Pos);
printf("\t Bus Fault active:%u\r\n",
(shcsr & SCB_SHCSR_BUSFAULTACT_Msk) >> SCB_SHCSR_BUSFAULTACT_Pos);
printf("\t Mem Fault active:%u\r\n",
(shcsr & SCB_SHCSR_MEMFAULTACT_Msk) >> SCB_SHCSR_MEMFAULTACT_Pos);
}
void dump_ufsr()
{
uint16_t ufsr = (SCB->CFSR & SCB_CFSR_USGFAULTSR_Msk) >> SCB_CFSR_USGFAULTSR_Pos;
printf("UFSR:\r\n");
printf("\t Divide by zero: %d\r\n",
(ufsr & DIVBYZERO_Msk) >> DIVBYZERO_Pos);
printf("\t Unaligned access: %d\r\n",
(ufsr & UNALIGNED_Msk) >> UNALIGNED_Pos);
printf("\t No coprocessor: %d\r\n",
(ufsr & NOCP_Msk) >> NOCP_Pos);
printf("\t Invaild PC load: %d\r\n",
(ufsr & INVPC_Msk) >> INVPC_Pos);
printf("\t Invaild state(attempt to entry ARM state): %d\r\n",
(ufsr & INVSTATE_Msk) >> INVSTATE_Pos);
printf("\t Undefined instruction: %d\r\n",
(ufsr & UNDEFINSTR_Msk) >> UNDEFINSTR_Pos);
}
|